Project Overview
Motionwell Automation entered the EV battery industry in 2023 with the design and delivery of an automated battery dismantlement line. The project addresses the growing need for safe, efficient battery module disassembly as the electric vehicle market expands across Southeast Asia.
Safety-First Design Philosophy
EV battery dismantlement presents unique challenges:
- High-voltage DC power (400V+) in battery modules
- Thermal runaway risk if cells are damaged during disassembly
- Exposure to toxic electrolyte materials
- Heavy module weights requiring mechanical handling
Motionwell’s design prioritizes safety at every step, engineered to ISO 13849 Performance Level d across all safety functions:
- Insulated tooling: All robot end-effectors use Nomex and GPO-3 fiberglass laminate insulation rated to 1,000V DC. Fixturing contact surfaces are lined with Delrin (acetal) to prevent electrical bridging between module terminals.
- Safety-rated controllers: ABB SafeMove2 safety functions running on the ABB OmniCore controller provide safe speed monitoring, safe standstill, and safe axis range limiting. The safety PLC (ABB Pluto B46) monitors all safety circuits independently of the robot controller.
- Interlocked access: Schmersal AZM300 solenoid-locking interlocks on all access doors. Doors remain locked until the robot reaches safe standstill and the area voltage is confirmed below 60V DC by the isolation monitoring relay.
- Environmental controls: LEV (local exhaust ventilation) hoods at each disassembly station with HEPA-filtered extraction rated at 2,000 m3/h. Continuous gas detection sensors (Draeger Polytron 8000) monitor for hydrogen fluoride and volatile organic compounds. The line operates under slight negative pressure relative to the surrounding facility.
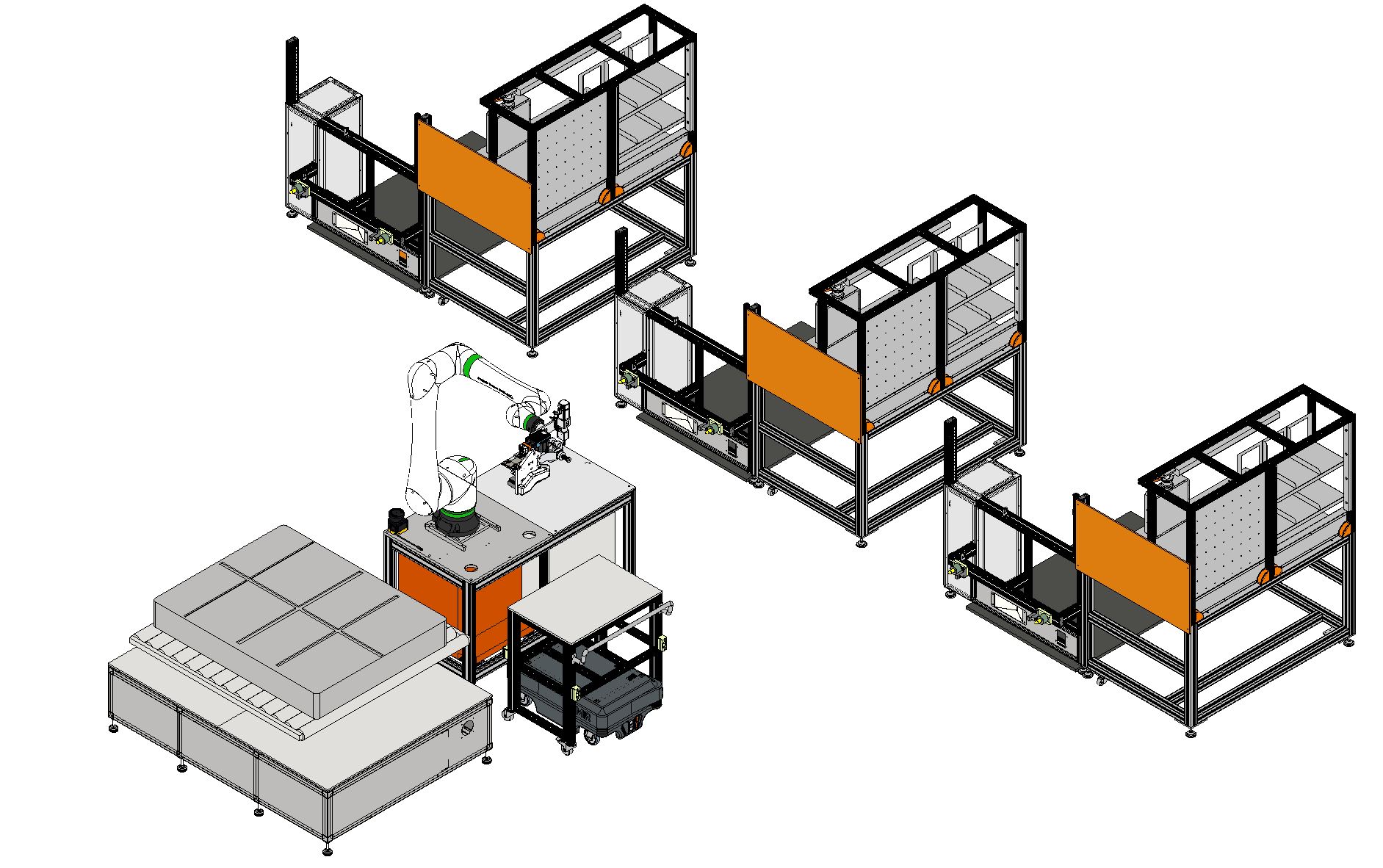
Line Architecture
Robotic Disassembly Stations
The line uses two ABB IRB 6700-200/2.60 robots, each with 200kg payload capacity and 2.6m reach. These 6-axis articulated robots were selected for the combination of high payload (battery modules weigh 30-80kg depending on format) and the dexterity required for fastener access in confined module geometries:
- Automated fastener removal using Atlas Copco QST torque-controlled nutrunners mounted on the robot flange, with torque and angle data logged per fastener for process traceability
- Busbar disconnection sequence performed with insulated grippers, following a voltage verification step via Fluke 1587 insulation resistance measurement integrated into the cell controller
- Module extraction using vacuum-assisted mechanical grippers with load cells confirming module weight against expected values before transfer
- Component sorting into 4 recycling streams: cathode material, anode material, copper busbars, and aluminum casing
The battery module handling procedure follows a strict sequence: incoming pack identification via barcode scan, automated voltage and insulation resistance check, mechanical disassembly, electrical disconnection, module separation, and final sorting. Each step requires a green status from the preceding operation before the robot proceeds.
Conveyor and Fixturing
- Bosch Rexroth TS 5 heavy-duty belt conveyor system rated for 500kg per pallet position
- Adjustable fixturing with Destaco pneumatic clamps and 3D-printed Nylon 12 locating nests, reconfigurable for prismatic and pouch cell module formats
- Gravity-free roller transfer between stations using Interroll zero-pressure accumulation zones
- 3-position accumulation buffer between disassembly and sorting to decouple station cycle times
Related
This project showcases Motionwell’s robotics integration and custom machine design expertise, with machine vision inspection supporting the barcode identification and defect detection steps.